
Les réflexions diffuses permettent de reconstituer une image
de ce qu'il y a derrière un obstacle.
Voir derrière un obstacle parait impossible - avec notre
équipement sensoriel en tous cas. Cependant Liu, X., et al.
(2019) montrent que puisque la lumière diffuse et peut revenir
de derrière l'obstacle, si on illumine avec un faisceau laser
pulsé qui balaye une paroi latérale (mur relais) qui
réfléchit ce faisceau vers les objets (Cf Fig 1.a), on peut
mesurer les réflexions pulsées qui reviennent des objets et
rebondissent sur cette paroi vers la caméra. Cf Fig 1b. Puis à
partir de ces nombreuses images réfléchies diffusément on peut
reconstituer par calcul (Cf Fig 1.c-d-e)l'image complète y
compris ce qui est derrière l'obstacle.; b, the light reflected back from the
scene onto the wall is recorded at the sensor, yielding an
impulse response H of the scene. c, Virtual light source.
The phasor-field wave of a virtual light source 𝒫(𝑥p,𝑡)
is modelled after the wavefront of the light source of the
template LOS system. d, The scene response to this virtual
illumination 𝒫(𝑥c,𝑡) is computed using H. e, The scene is
reconstructed from the wavefront 𝒫(𝑥c,𝑡) using wave
diffraction theory. The function Φ(·) is also taken from the
template LOS system. Amp., phasor-field amplitude.")
Abstract de Liu,
X., et al. (2019)
L'imagerie sans ligne de visée permet aux objets d'être observés lorsqu'ils sont partiellement ou totalement occultés de la vue directe, en analysant les réflexions diffuses indirectes sur une surface de relais secondaire (relay surface). Malgré de nombreuses applications potentielles les méthodes existantes, les applications pratique restent lointaines en raison de limitations conceptuelles.
Les auteurs évoquent notamment l'hypothèse
d'une seule diffusion, d'une réflectance diffuse idéale et
d'un manque d'occlusions dans la scène cachée. En revanche,
les systèmes d'imagerie en ligne de visée n'imposent aucune
hypothèse sur la scène imagée, bien qu'ils s'appuient sur des
processus mathématiquement simples de propagation d'onde
diffractive linéaire. Ici, nous montrons que le problème de
l'imagerie sans visibilité directe peut également être formulé
comme un problème de propagation d'onde diffractive, en
introduisant un champ d'onde virtuel que nous appelons le
champ de phaseur. Les scènes sans visibilité directe peuvent
être imagées à partir de données brutes de temps de vol en
appliquant les opérateurs mathématiques qui modélisent la
propagation des ondes dans un système d'imagerie en visibilité
directe conventionnel. Notre méthode produit une nouvelle
classe d'algorithmes d'imagerie qui imitent les capacités des
caméras en ligne de visée. Pour démontrer notre technique,
nous dérivons trois algorithmes d'imagerie, modélisés d'après
trois systèmes de visibilité directe différents. Ces
algorithmes reposent sur la résolution d'une intégrale de
diffraction d'onde, à savoir l'intégrale de diffraction de
Rayleigh – Sommerfeld. Des solutions rapides à la diffraction
de Rayleigh – Sommerfeld et ses approximations sont facilement
disponibles, ce qui profite à notre méthode. Nous démontrons
l'imagerie sans visibilité directe de scènes complexes avec
une forte diffusion multiple et une lumière ambiante, des
matériaux arbitraires, une large plage de profondeur et des
occlusions. Notre méthode gère ces cas difficiles sans
inverser explicitement un modèle de transport de lumière. Nous
pensons que notre approche contribuera à libérer le potentiel
de l'imagerie sans visibilité directe et à promouvoir le
développement d'applications pertinentes non limitées aux
conditions de laboratoire.
Une nouvelle approche algorithmique rend le problème soluble.
Liu, X., et al. (2019) ont développé un nouvelle approche
conceptuelle et des algorithmes qui facilitent le calcul de
l'image à partir des décalages temporels dans la propagation des
ondes de réflexions diffuses- en considérant le mur relais comme
une sorte de projecteur puis d'objectif et de senseur de très
grande ouverture, les algorithmes s'inspirent de ceux d'une
caméra "line-of-sight" et deviennent bien plus simples ( enfin
... moins complexes) . Here we show that the problem of non-line-of-sight imaging can also be formulated as one of diffractive wave propagation, by introducing a virtual wave field that we term the phasor field. Non-line-of-sight scenes can be imaged from raw time-of-flight data by applying the mathematical operators that model wave propagation in a conventional line-of-sight imaging system. Our method yields a new class of imaging algorithms that mimic the capabilities of line-of-sight cameras. Liu, X., et al. (2019)
 encourage le lecteur à aller vérifier
dans l’article d’origine : Liu, X., et al. (2019) ici
encourage le lecteur à aller vérifier
dans l’article d’origine : Liu, X., et al. (2019) ici
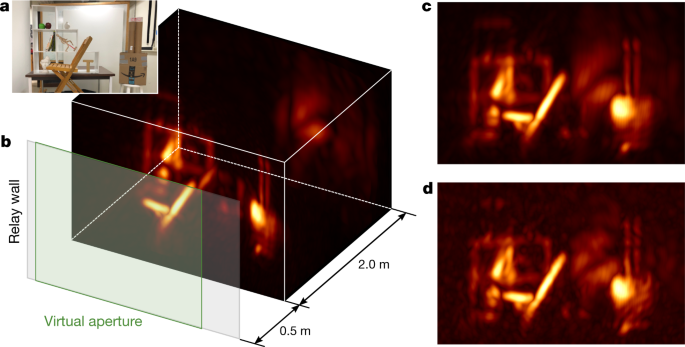
Fig 2: a, Photographie de la scène vue depuis le mur relais. La scène contient des géométries occlusales, avec des objets vers l'avant (comme la chaise) qui cachent partiellement les objets plus en arrière; plusieurs réflectances de surface anisotropes, une grande profondeur de champ et une forte lumière ambiante et à diffusion multiple. b, visualisation 3D de la reconstruction avec des champs de phaseurs (λ = 6 cm). Nous incluons l'emplacement du mur de relais et la couverture de l'ouverture virtuelle à des fins d'illustration. c, vue frontale de la scène, capturée avec un temps d'exposition de 10 ms par position laser. d, vue frontale capturée avec un temps d'exposition de seulement 1 ms (24 s pour le balayage complet). [img]. Source : Liu, X., et al. (2019) ici
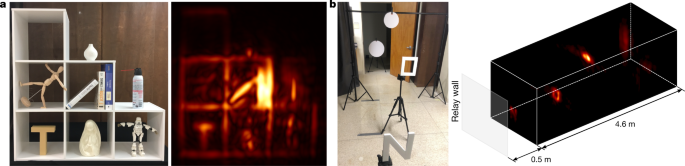
Vérification de la robustesse
Liu, X., et al. (2019) ont testé la robustesse de
cette technique en pleine lumière, et avec une très forte
profondeur de champ cf figure 3.
- Liu, X., Guillén, I., Manna, M. L., Nam, J. H., Reza, S. A., Le, T. H., … Velten, A. (2019). Non-line-of-sight imaging using phasor-field virtual wave optics. Nature, 572(7771), 620‑623. https://doi.org/10.1038/s41586-019-1461-3





Aucun commentaire:
Enregistrer un commentaire